Just 'Cuz Robotics
Tarakan Dual Brushed Motor Electronic Speed Controller
Tarakan Dual Brushed Motor Electronic Speed Controller
Share
Couldn't load pickup availability
End of Life Sale! 34% off!
The Tarakan ESC will be replaced by our new WEKA Dual ESC so these will not be restocked. This page will be left up for reference for a few months.
New Smaller Tarakan Rev 6 is Here!
Perfect for DartBox Drive gearmotors and any other brushed beetle drive solution! This lightweight ESC is able to power two independent DartBox gearmotors for a powerful, nimble robot drivetrain (or even four or more motors in some applications). Tarakan has overcurrent protection built in unlike many cheaper ESC designs, meaning you won’t burn up your pricey ESC in the heat of battle and are less likely to damage your motors. All this in just 15.4 13.6 grams (0.48oz)!
(More photos and CAD for the Rev 6 design coming soon)
CAD Mockup available here (5/11/23 - still needs to be updated to reflect flatter Rev 6 design)
Specs
Specifications
- Input voltage: 11V - 25V (3S to 6S lipo battery)
- Channels: 2
- Motor type: brushed
- Maximum continuous current per channel: 12 amps
- Reversible: yes
- Braking: yes (optional)
- Mixing: yes (optional)
- Current Limiting (will prevent damaging the ESC by limiting motor current, but will not protect motors from overheating)
- Low Battery Voltage Protection (set to 3S voltage levels)
- PCB size: 54 x 32 x 5.7mm [CAD Mockup available here]
- New Rev 6 design - length is 4mm shorter and the board is about 5mm thinner thanks to the new BEC design!
- BEC (Battery Eliminator Circuit/regulator): +5V 1 amp maximum switch-mode regulator
Usage
Usage Information
Power input - Black / Red flying leads (tinned). Connect a wire harness to supply 11-25V DC. Observe correct polarity!
Signal input - 2x “Dupont” style servo leads. Connect a receiver or other controller. The three connections are color coded:
- Black - Ground
- Red +5V (BEC / regulator output)
- White - servo pulses input
Normally these are connected to channels 1&2 on an RC receiver. The internal regulator can supply power to the receiver. You may read advice to “only connect the red wire / BEC on one channel”. In this case, it is not necessary to disconnect the red wire on the 2nd channel, as the Tarakan ESC has only one BEC which is connected to both channels.
Motor output - connect wires and/or connectors of your choice to connect two brushed motors. These should accept the voltage supplied and have a maximum stall current of 12 Amps each.
Note about BEC / 5v regulator
The 5v regulator is not strong enough to run big or strong servos - it is intended for powering electronics only.
If using more than one ESC that has a built-in BEC, it is recommended to connect only one +5v pin to the receiver, so the regulators aren’t “fighting” each other.
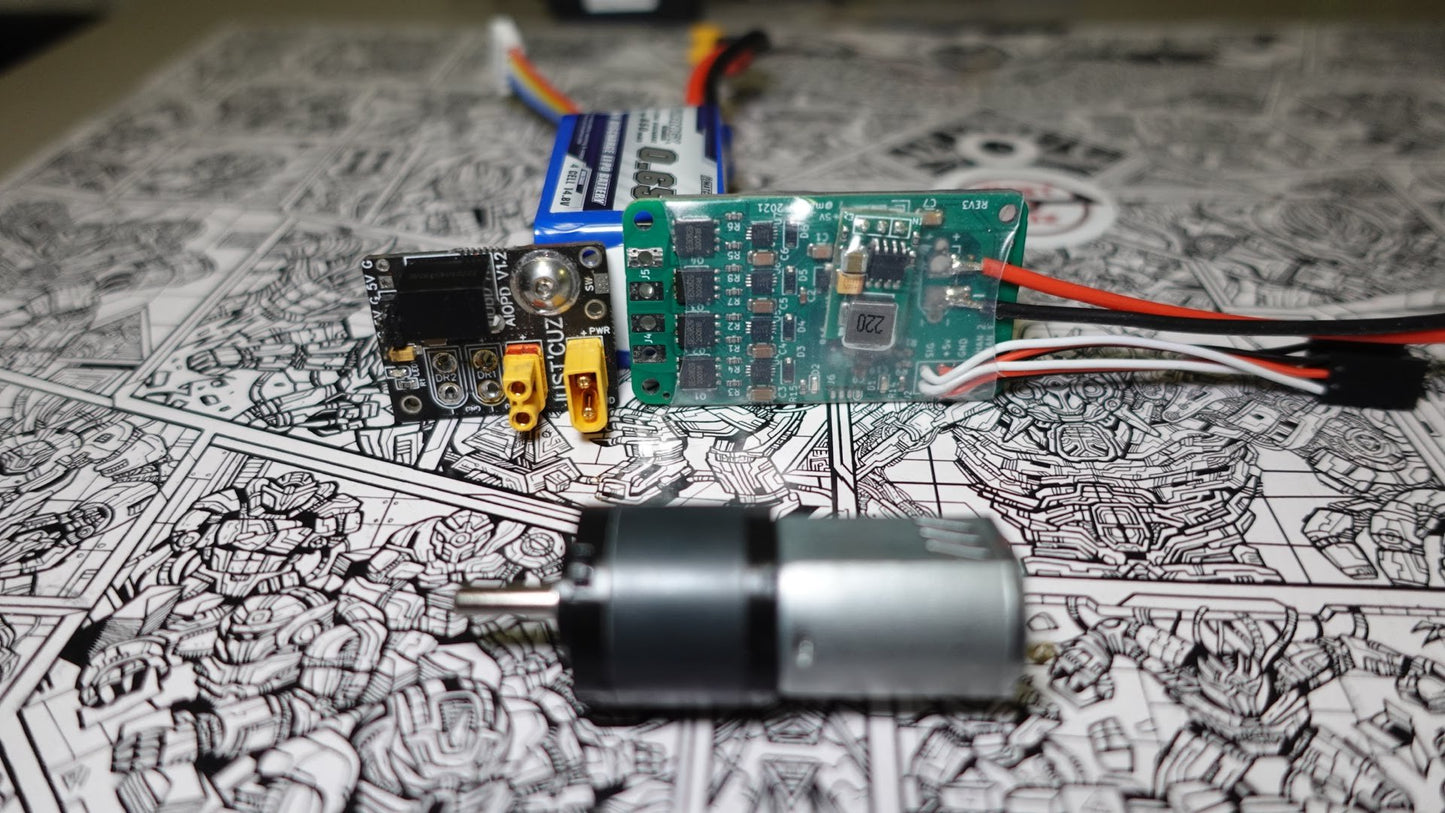
Tarakan Overview and Usage (Documentation here!)
Power wires are pre-soldered to the battery connections Bat+ Bat- (RED to + and BLACK to -)
Servo collectors can be plugged into 3 pin connections labeled SIG, +5V, and GND (White to Sig, Black to GND, Red to +5V
Motors connect to the pads labeled J4 and J5. If your motors have a red dot indicating one tab, this is the lead that positive voltage will go to to make it spin counter-clockwise. Connect the ‘red’ tab to the outermost J4/J5 pads, and the other to the innermost ones.
Mixing is enabled by default. This makes it so radio CH1 is forward/reverse on BOTH motors, and CH2 is for steering. This is perfect for pistol grip radios or one-stick arcade-style driving. To disable it for tank-style, solder across the jumper JP1 to join the two pads.
Note: Some firm tugs can pull wires out of the servo connectors that plug into your receiver. I recommend adding a dab of hot glue to the wires where they join into the connector to act as a bit of strain relief and prevent this. This goes for any servo-style connectors, not just those on the Tarakan.
Q&A
Who Designed Tarakan ESCs?
Mark Robson designed this product, unlike the Just ‘Cuz PCB products with black PCBs which were designed by Seth Schaffer. Mark is a talented electrical engineer based in the UK and the mind behind many of Bristol Bot Builder’s products including the Malenki Nano Fairyweight (150 gram robot) Dual ESC/Receiver combo.
Can the Tarakan control brushless motors? How about stepper motors?
No and no. Brushless motors require a much more sophisticated sensing circuit, or sensor wires from the motor.
Can I use Tarakan with a Arduino / Raspberry Pi / ESP32 / Insert name of controller here?
Yes, provided it can output servo pulses for the two channels. Be aware that some models of Raspberry Pi will use more current than the Tarakan BEC can supply. In that case you would need a separate BEC / regulator.
Can I short-circuit the two channels and use it as one big ESC?
Not yet and not without significant firmware updates.
What does Tarakan mean?
It’s Russian for “cockroach” :)
I used a pair of these for 4 NHRL competitions with no problems, while my non-electrical engineering brain has had problems with other esc's in the past. Very easy to use.